手 机:15112316407
Q Q:272794434
网 址:www.007her.com
地 址:广东省东莞市大岭山镇农村工业路22号101室
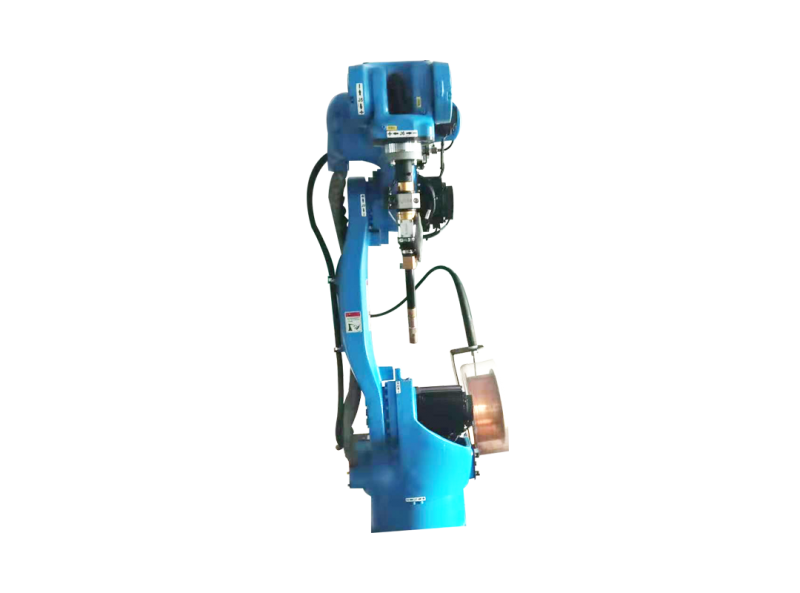
焊接机器人是从事焊接(包括切开与喷涂)的工业机器人,是一种多用处的、可重复编程的主动操控操作机,具有三个或更多可编程的轴,用于工业主动化范畴。为了习惯不同的用处,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同东西或称末端执行器。机器人焊接就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切开或热喷涂。

结构规划:
由于所规划的焊接机器人是在准平面、空间狭隘的环境下作业,为了确保机器人能依据电弧传感器的误差信息,盯梢焊缝主动焊接,要求所规划的机器人应该结构紧凑、移动灵活且作业稳定。依据机器人各结构的运动特色,运用模块化规划办法,把机器人组织分为轮式移动平台、焊炬调理组织和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗盯梢,焊炬调理组织担任焊缝精准盯梢,电弧传感器完成焊缝误差实时识别。机器人操控器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,选用全封闭式结构,进步其体系可靠性。
焊接机器人的特色:
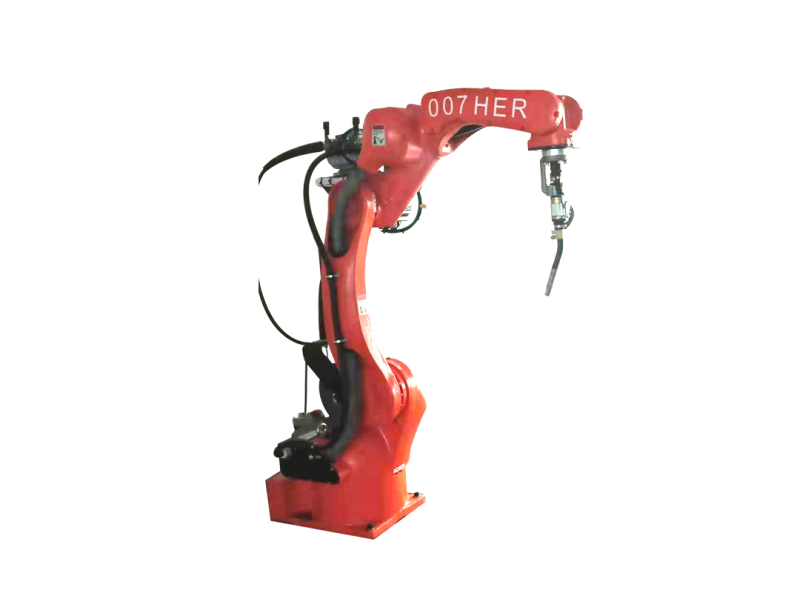
点焊对焊接机器人的要求不是很高。由于点焊只需点位操控,至于焊钳在点与点之间的移动轨道没有严格要求,这也是机器人最早只能用于点焊的原因。点焊用机器人不只要有满足的负载才能,而且在点与点之间移位时速度要方便,动作要平稳,定位要准确,以减少移位的时刻,进步作业效率。
点焊机器人所需的负载才能取决于所使用的钳子的形状。从变压器别离的焊接钳,30~45公斤负载的机器人就满足了。可是,这种焊接钳子一方面由于二次电缆较长,电气能量损失较大,不利于机器人将焊接钳子突出到工件内部进行焊接,另一方面,电缆配线随着机器人的动作不断晃动,电缆的损伤比较快。 因而,现在选用整体式焊接钳子的数量正在增加。 该焊接钳与变压器总质量约为70kg。考虑到机器人关于以较大的加速度将焊接钳运送到空间方位进行焊接具有满足的负荷才能,一般挑选负荷为100-150kg的重载机器人。以满足在接连点焊时焊接钳在短距离内快速位移的要求。新的大型机器人增加了在0.3秒内完成50毫米位移的功能。这对电机性能,微型计算机的运算速度和算法提出了更高的要求。
手机:15112316407(蒋生)
电话:13923782005(何生)
邮箱:272794434@qq.com
地址:广东省东莞市大岭山镇农场工业路22号101室

微信号